貝爾曼方程中的價值函數
前續
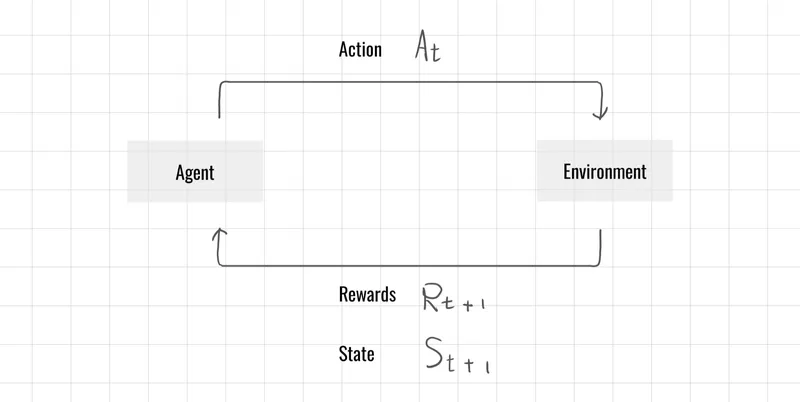
在討論價值函數之前,需要先理解獎勵期望值與回報的觀念,此篇將介紹策略(Policy) ,在先前我們所討論的馬可夫決策過程中,只討論了在有限或是無限回合上獎勵總和的觀念,
而本篇討論的則是更具體的推導過程,從價值函數在到貝爾曼方程,貝爾曼方程不是直接給出最佳策略,而是用來評估最佳策略的價值,這些觀念攸關了強化學習在動態規劃上的基礎
策略 (Policy)
策略是指在給定狀態下,代理選擇各種可能動作的機率分佈
為當前狀態
為可能採取的動作
表示在狀態 下選擇動作 的概率
策略 定義了在每個狀態下採取各種行動的機率分佈 ,有了策略我們便能在價值函數的評估中去評估,在狀態下的每一個動作所能帶來的獎勵。
狀態價值函數 (State Value Function)
價值函數 (Value Function) 是一種對未來期望回報評估,狀態價值函數只考慮一個狀態 S ,在這個狀態下的所有策略動作機率分佈,並將所有動做未來累積的獎勵加權總
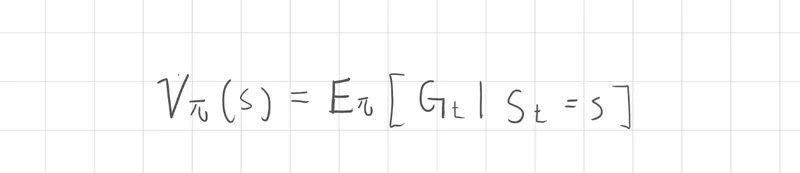
公式表示當處於狀態 s 中,所能獲得的價值評估,這裡延續了回報G的概念,因此它決定了未來的狀態轉移與回報序列,而這正是價值函數的概念
這裡所提到的回報概念在我們上一篇文章中有介紹,如果不熟悉可以參考 https://r036.blog/articles/reinforcement-learning/RL20250003
不管是回報還是價值函數屬於抽象定義,而貝爾曼方程中的概念可以得知更具體的描述
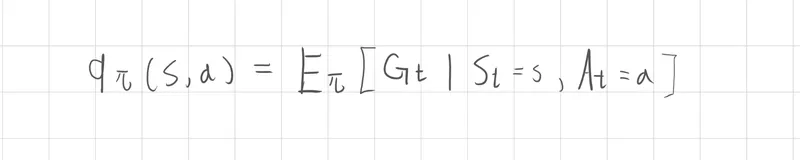
行動價值函數 (Action Value Function)
另一個情況則是行動價值函數則是同時考慮了狀態 S 與 動作 A ,也就是在特定狀態下採取某個動作後所得到的期望價值
貝爾曼方程的價值函數定義
貝爾曼方程(Bellman Equation) 是來理解與計算最佳策略下各個狀態價值的方法,它透過遞迴的概念,將問題分解成即時獎勵與未來回報價值。透過這種方式,我們可以逐步評估每個狀態的重要性,並最終找出在整個環境中表現最好的行動策略。
貝爾曼方程
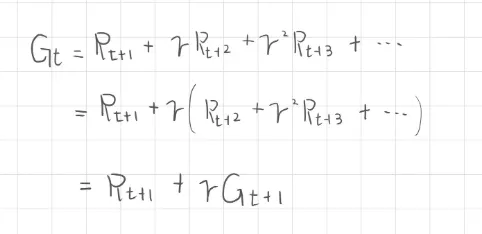
價值函數中的期望值包含了回報G與狀態,回報G的展開我們得到了當下的即時獎勵R,以及帶有折扣的回報G,這部分我們已經在馬可夫決策過程介紹過。
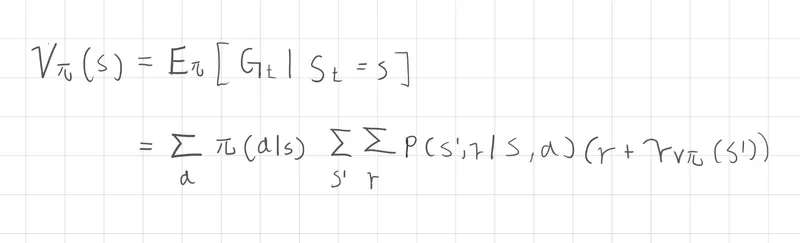
繼續將價值函數的期望值的表達式展開
-
我們需要先計算策略中每個動作的機率
-
根據環境的不確定性轉移到未來狀態 s' 並獲得 r 的機率
-
將狀態轉移的機率乘上即時回報 r + 折扣後未來的價值
你可以發現貝爾曼方程本質上是更詳細的描述了策略動作機率、期望值算法、狀態轉移機率、回報獎勵,這些觀念與馬可夫決策過程提到的概念是一樣的。
結語
此篇我花了不少時間消化,結論是貝爾曼方程的定義敘述上比較複雜,然而在理解上只需要拆解每一個小部分,此章節我們可以簡單構思少量的動作 a 或是 狀態 s ,但是當這些集合參數是數以千計的時候,工程師或是電腦科學家只需要構思開發架構,剩下的則是計算機最擅長的事情,因為強化學習本質還是給計算機運行的。
如果在解讀上還是有些吃力,可以將每個部份的觀念拆解,回顧馬可夫決策過程的核心觀念,需理解無窮的數學觀念、或是在程式碼運行的遞迴觀念、機率論、統計學等等,最後才到應用層面所面對的子領域知識。