神經網路的基礎原理,多層感知器(Multilayer Perceptron, MLP)
前續
本實作展示了一個基本的多層感知器(Multilayer Perceptron, MLP)用於二分類任務,並以可視化的方式呈現分類邊界,透過 TensorFlow 的低階 API,來理解神經網路訓練的本質。
開發環境: TensorFlow
理論關鍵字: sigmoid 、Stochastic Gradient Descent
完整程式碼
這裡提供本文的完整程式碼供學習使用,可以加入Github收藏,日後有更新都歡迎使用
https://github.com/Rayder-R/System-36-blog-example
目錄
- 比較線性與非線性推理
- 資料準備階段
- 單層感知器實作
1. 比較線性與非線性推理
如果使用SLP單層模型會無法處理非線性問題,如圖
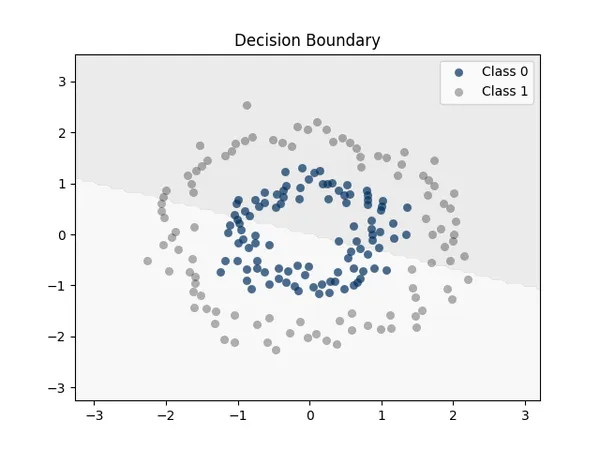
SLP單層模型準確度
Model Accuracy: 50.50%損失函數
Epoch 10, Loss: 0.7951
Epoch 20, Loss: 0.7521
...
Epoch 90, Loss: 0.6939
Epoch 100, Loss: 0.6935
2. 準備資料階段
使用Numpy的隨機常態分佈來做為簡易資料集,
以下主要任務
- 隨機生成資料各100筆
- 合併資料集
- 繪製資料點視覺化
# %% 資料準備
# 生成環形數據
np.random.seed(40)
n_points = 100
# 類 0: 圓形內部
theta = np.linspace(0, 2 * np.pi, n_points)
r_0 = 1 + 0.2 * np.random.randn(n_points) # 加一些隨機擾動
class_0 = np.vstack([r_0 * np.cos(theta), r_0 * np.sin(theta)]).T
# 類 1: 圓形外部
r_1 = 2 + 0.2 * np.random.randn(n_points) # 外圓
class_1 = np.vstack([r_1 * np.cos(theta), r_1 * np.sin(theta)]).T
print("class_0 shape:", class_0[:5], class_0.shape)
print("class_1 shape:", class_0[:5], class_1.shape)
# 合併資料與標籤
data = np.vstack([class_0, class_1]).astype(np.float32)
labels = np.array([0]*100 + [1]*100).astype(np.float32).reshape(-1, 1)
# 顯示合併後資料與 shape
print("Data set:", data[:1], "shape:", data.shape)
print("Labels set:", labels[:1], "shape:", labels.shape)
# 繪製數據
plt.scatter(class_0[:, 0], class_0[:, 1], color='#003060', label='Class 0', alpha=0.7, s=40)
plt.scatter(class_1[:, 0], class_1[:, 1], color='black', label='Class 1', alpha=0.3, s=40)
plt.legend()
plt.title("Circular Data")
plt.show()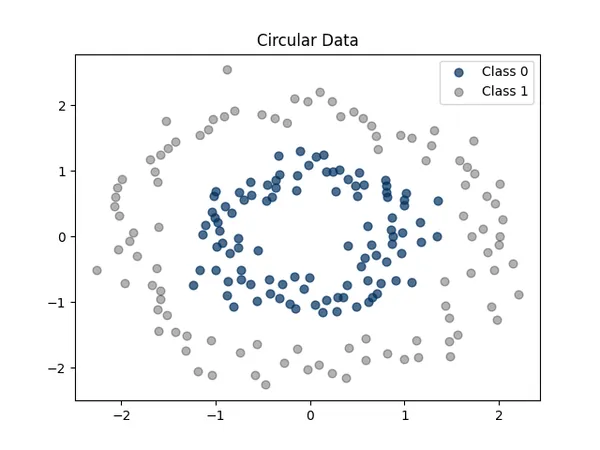
2. 建立多層感知器(Multilayer Perceptron, MLP)
# %% 多層感知器 (Multilayer Perceptron, MLP) 設計
class MultilayerPerceptron:
def __init__(self, input_dim, hidden_dim):
# 隱藏層的權重和偏置
self.W1 = tf.Variable(tf.random.normal([input_dim, hidden_dim]))
self.b1 = tf.Variable(tf.zeros([hidden_dim]))
# 輸出層的權重和偏置
self.W2 = tf.Variable(tf.random.normal([hidden_dim, 1]))
self.b2 = tf.Variable(tf.zeros([1]))
def forward(self, x):
# 隱藏層 + ReLU 激活函數
hidden_output = tf.nn.relu(tf.matmul(x, self.W1) + self.b1)
return tf.matmul(hidden_output, self.W2) + self.b2
前向傳播(Forward Propagation)
def forward(self, x):
# 隱藏層 + ReLU 激活函數
hidden_output = tf.nn.relu(tf.matmul(x, self.W1) + self.b1)
return tf.matmul(hidden_output, self.W2) + self.b2relu : ReLU激活函數
W1:定義隱藏層矩陣加權,為矩陣乘法運算
b1:平移調整模型的決策邊界,這邊設為0
forward(self, x) : 經過加權後的矩陣,輸出為一個預測值
3. 訓練模型階段
# 定義交叉熵損失函數
def binary_crossentropy_loss(y_true, y_pred):
return tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(labels=y_true, logits=y_pred))
# 訓練模型
def train_model(model, data, labels, learning_rate=0.1, epochs=100):
optimizer = tf.optimizers.SGD(learning_rate)
loss_history = []
for epoch in range(epochs):
with tf.GradientTape() as tape:
logits = model.forward(data) # 前向傳播
loss = binary_crossentropy_loss(labels, logits) # 計算損失
# 計算梯度並更新權重
gradients = tape.gradient(
loss, [model.W1, model.b1, model.W2, model.b2]) # 更新所有權重和偏置
optimizer.apply_gradients(
zip(gradients, [model.W1, model.b1, model.W2, model.b2]))
# 損失函數變化紀錄
loss_history.append(loss.numpy())
if (epoch+1) % 10 == 0:
print(f"Epoch {epoch+1}, Loss: {loss.numpy():.4f}")
# 畫出損失曲線
plt.plot(loss_history)
plt.xlabel("Epochs")
plt.ylabel("Loss")
plt.title("Training Loss Curve")
plt.show()
return model因為使用的是TensorFlow 低階語言,在語法邏輯上會將步驟拆分更細,因此依序做說明。
模型超參數(Hyperparameter)
def train_model(model, data, labels, learning_rate=0.1, epochs=100)帶入模型、數據集、真實標籤、學習率、訓練次數
計算梯度
with tf.GradientTape() as tape: logits = model.forward(data) loss = binary_crossentropy_loss(labels, logits)
1. 向前傳播
使用model.forward 函數來計算預測值,data 是要預測的資料集,經函數加權(weights)後輸出值為 logits
2. 計算損失函數
# 定義二元交叉熵損失函數
def binary_crossentropy_loss(y_true, y_pred):
return tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(labels=y_true, logits=y_pred))tf.nn.sigmoid_cross_entropy_with_logits(labels=y_true, logits=y_pred) : 計算真實標籤與預測值之間的損失數
sigmoid : 此函數使用sigmoid函數來進行二元分類,在使用交叉熵(Cross-Entropy)來計算損失數
loss = binary_crossentropy_loss(labels, logits) # 計算損失
所以這邊最終獲得了損失數 loss
反向傳播(Backpropagation)
反向傳播主要目的是計算當前梯度,使用微積分中的微分與鏈鎖法則(Chain Rule)概念,在TensorFlow中已經包裝成一個函數可以使用,只需要帶入定義在model中的隱藏層和輸出層即可,也就是前向傳播的路徑
# 計算梯度並更新權重 gradients = tape.gradient( loss, [model.W1, model.b1, model.W2, model.b2]) # 更新所有權重和偏置
透過鏈鎖法則的數學觀念可以得知,它將原先前向傳播的路徑反方向逐層遞回,並透過偏微分計算出每個參數(如 , 等)對整體損失函數 的影響程度 對於參數的梯度可以表示為
梯度下降(Gradient Descent)
梯度下降是一種用來最小化損失函數 的優化演算法。它透過對每個參數求偏導數(即梯度),沿著損失函數下降最快的方向更新參數。
- :參數(例如權重 weight)
- :學習率(Learning Rate),控制每次更新的幅度
- :損失函數的梯度(Gradient),表示函數變化最快的方向
在上一個反向傳播(Backpropagation) 過程中所得出的梯度,將透過學習率來進行參數更新。
優化器 Optimizer
在TensorFlow中使用物件optimizers,選擇的方法為隨機梯度下降(Stochastic Gradient Descent) 方法,並帶入學習率參數
optimizer.apply_gradients :即為梯度下降函數
optimizer = tf.optimizers.SGD(learning_rate)
optimizer.apply_gradients(
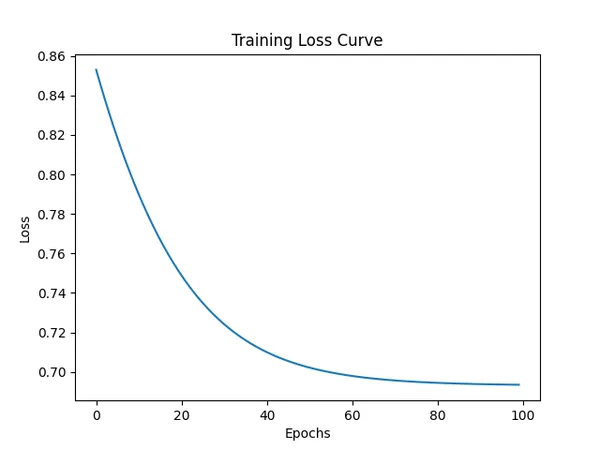
zip(gradients, [model.W1, model.b1, model.W2, model.b2]))損失函數視覺化
將每一次訓練epochs所計算的損失函數記錄在 list 中
# 損失函數變化紀錄
loss_history.append(loss.numpy())
if (epoch+1) % 10 == 0:
print(f"Epoch {epoch+1}, Loss: {loss.numpy():.4f}")
# 畫出損失曲線
plt.plot(loss_history)
plt.xlabel("Epochs")
plt.ylabel("Loss")
plt.title("Training Loss Curve")
plt.show()每次訓練中的損失函數
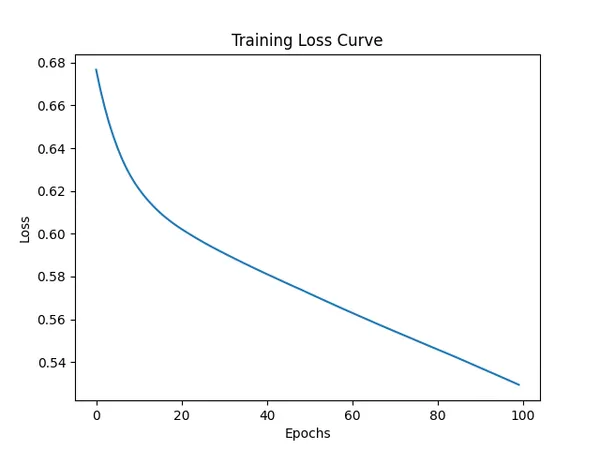
Epoch 10, Loss: 0.6240
Epoch 20, Loss: 0.6035
...
Epoch 90, Loss: 0.5382
Epoch 100, Loss: 0.52944. 評估模型階段
def predict(model, data) :
logits = model.forward(data)
return tf.sigmoid(logits).numpy() > 0.5sigmoid函數
特性轉換成 0 或 1,適合二元分類,0.5為中間點邊界,將函數將輸入值趨近於0或1
準確率評估
計算預測函數與實際標籤的正確數與總數,並求出成功機率
def evaluate_accuracy(model, data, labels):
predictions = predict(model, data)
accuracy = np.mean(predictions == labels)
print(f"Model Accuracy: {accuracy * 100:.2f}%")
return accuracy評估結果
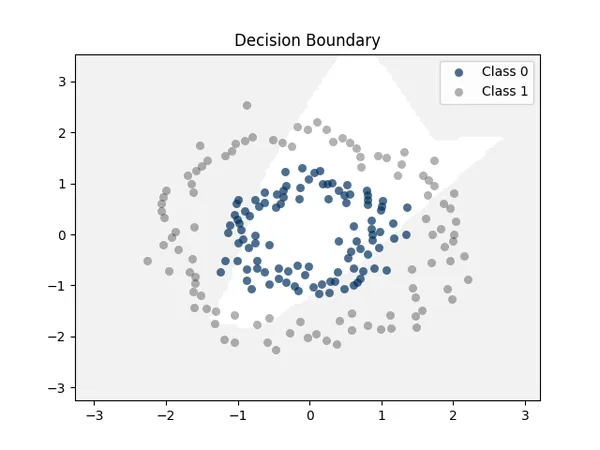
Model Accuracy: 74.00%5. 視覺化決策邊界
# 視覺化決策邊界
def plot_decision_boundary(model, data, labels):
x_min, x_max = data[:, 0].min() - 1, data[:, 0].max() + 1
y_min, y_max = data[:, 1].min() - 1, data[:, 1].max() + 1
xx, yy = np.meshgrid(np.linspace(x_min, x_max, 100),
np.linspace(y_min, y_max, 100))
grid_data = np.c_[xx.ravel(), yy.ravel()].astype(np.float32)
# 預測網格點
predictions = predict(model, grid_data).reshape(xx.shape)
plt.contourf(xx, yy, predictions, colors=['white', 'gray'], alpha=0.1)
plt.scatter(class_0[:, 0], class_0[:, 1],
alpha=0.7,
linewidth=0.1,
s=40,
color='#003060',
label='Class 0'
)
plt.scatter(class_1[:, 0], class_1[:, 1],
alpha=0.3,
linewidth=0.1,
s=40,
color='black',
label='Class 1'
)
plt.legend()
plt.title("Decision Boundary")
plt.show()6. 運行流程整合
model = MultilayerPerceptron(
input_dim=2, hidden_dim=5) # 建立模型,2 個輸入特徵,5 個隱藏層神經元
model = train_model(model, data, labels, learning_rate=0.1, epochs=100) # 訓練模型
evaluate_accuracy(model, data, labels) # 計算準確率
plot_decision_boundary(model, data, labels) # 繪製決策邊界