- 卷積神經網絡-初版 (Convolutional Neural Networks, CNN)
- 簡序
- 研究方向
- 學前參考
- 簡易實作
- CNN 基本原理
- 卷積層 (Convolution Layer)
- 卷積核(Kernel / Filter)
- 步幅(Stride)
- 激活函數 (Activation Function)
- 非線性激活函數(ReLU)
- 池化層 (Pooling Layer)
- 常見的池化函數
- 全連接層 (Fully Connected Layer)
- 輸入層(Input Layer)
- 隱藏層(Hidden Layers)
- 輸出層(Output Layer)
- 多分類問題
- 二元分類問題
- 前向傳播(Forward Propagation)
- 損失函數
- 反向傳播(Backpropagation,BP)
- 梯度 (Gradient)
- 梯度下降(Gradient Descent)
- 梯度存在問題
- 局部最小值和鞍點 ( Local minima and saddle points )
- 梯度消失(Vanishing Gradient)
- 梯度爆炸 ()
- 文章發布出處
- 參考文獻
卷積神經網絡-初版 (Convolutional Neural Networks, CNN)
簡序
本篇為卷積神經網路(convolutional neural network,CNN)的研究紀錄,如今網路上已有許多優質的CNN介紹文章,因此本文將直接聚焦在CNN每個的階段流程來進行研究紀錄。
研究方向
- CNN 基本原理
- CNN 程式碼運行原理
學前參考
人工智能許多部份都是屬於黑箱模型(Black Box Model),因此使用更多科學的方法來進行調整與觀察,而許多複雜的理論函數,都已經被包裝成一段函式方法供開發者使用,函數內部如何工作屬於科研方面的範疇。
黑箱模型: 黑箱模型在電腦科學領域中指的是只能了解輸入,但無法輕易知道內部運作,例如在CNN中即便能用數學矩陣以及微積分推導和理解過程,但是當軟體數據規模龐大且變數複雜,即便拆解數學推導過程,也不一定具備可解釋性。
簡易實作
如果需求是為敏捷開發功能應用導向為主,那麼這裡提供一個基本的CNN模型範本,只需要調整參數就能獲得功能來做使用。
程式碼展示: GitHub 連結
運行結果:
elism_threads for best performance.
Epoch 1/10
240/240 - 52s - loss: 0.5044 - accuracy: 0.8526 - val_loss: 0.1444 - val_accuracy: 0.9571 - 52s/epoch - 217ms/step
Epoch 2/10
240/240 - 51s - loss: 0.1448 - accuracy: 0.9554 - val_loss: 0.0930 - val_accuracy: 0.9730 - 51s/epoch - 211ms/step
....
Epoch 9/10
240/240 - 6s - loss: 0.0450 - accuracy: 0.9854 - val_loss: 0.0399 - val_accuracy: 0.9872 - 6s/epoch - 27ms/step
Epoch 10/10
240/240 - 6s - loss: 0.0413 - accuracy: 0.9870 - val_loss: 0.0401 - val_accuracy: 0.9878 - 6s/epoch - 26ms/step
313/313 [==============================] - 1s 3ms/step - loss: 0.0315 - accuracy: 0.9886
準確率= 0.9886000156402588
Mnist_cnn_model.h5 模型儲存完畢elism_threads for best performance.
313/313 [==============================] - 1s 3ms/step - loss: 0.0315 - accuracy: 0.9886
準確率= 0.9886000156402588
313/313 [==============================] - 1s 3ms/step
313/313 [==============================] - 1s 2ms/step
預測結果: 7, 真實標籤: 7
預測結果: 2, 真實標籤: 2
...
預測結果: 5, 真實標籤: 5
預測結果: 9, 真實標籤: 9CNN 基本原理
卷積層 (Convolution Layer)
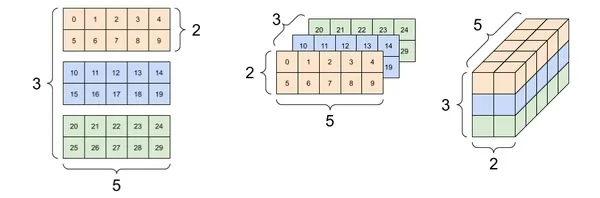
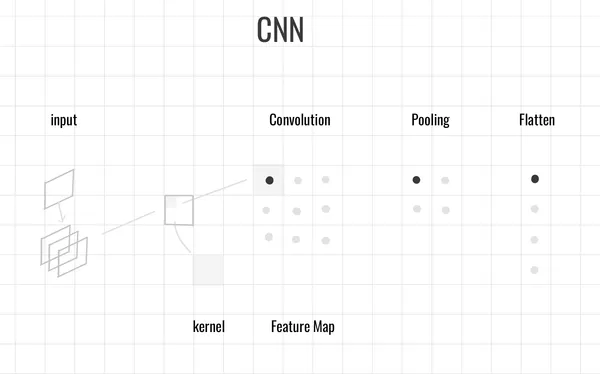
卷積層負責從輸入數據中提取特徵,當卷積層接收圖片時,圖片可以用張量表示。例如,(5 × 2 × 3) 代表一張5 × 2張量、有 3 個通道(例如 RGB 三個顏色通道)的圖片。
卷積核(Kernel / Filter)
是小型矩陣,用來檢測圖片的特徵,例如邊緣或紋理。它會在圖片上滑動(進行卷積運算),並產生 特徵圖(Feature Map),這個卷積核的大小定義皆為開法者設計。
步幅(Stride)
指的是卷積核每次滑動的距離,越大的步幅會讓輸出圖變小,但計算更快,較小的步幅則能保留更多細節。
激活函數 (Activation Function)
在CNN中不管是在卷積層,或是全連接層,都有不同的函數可以處理不同問題,例如ReLU函數可以讓神經網絡能夠學習複雜的模式,解決梯度消失問題,使模型能夠學習更深層的特徵。
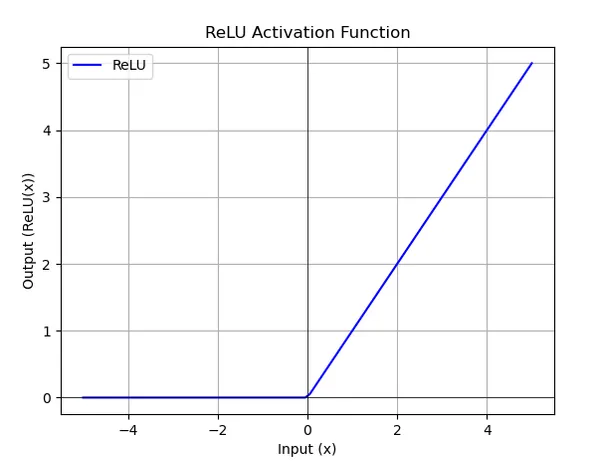
非線性激活函數(ReLU)
ReLU 函數將負數輸出為零,正數保持不變,即保留正數,讓模型能夠學習到更複雜的特徵,解決梯度消失問題。
池化層 (Pooling Layer)
池化層的作用是 降低特徵圖的維度,減少計算量並提升模型的泛化能力。也有專案選擇不加池化層,以保留更多資訊特徵,取決於開發考量。
常見的池化函數
-
最大池化(Max Pooling)
最大池化選擇範圍內的最大值,以保留最重要的特徵。
在白話一點的說,可以想像找出圖片最顯眼的特徵表現
-
平均池化(Average Pooling)
平均池化則計算範圍內數值的平均值,適用於某些需要平滑處理的情境。
白話一點的說,找平均值就像圖片的色塊柔邊處理
全連接層 (Fully Connected Layer)
負責將來自卷積和池化層的特徵轉換為最終輸出,並進行特徵分類。
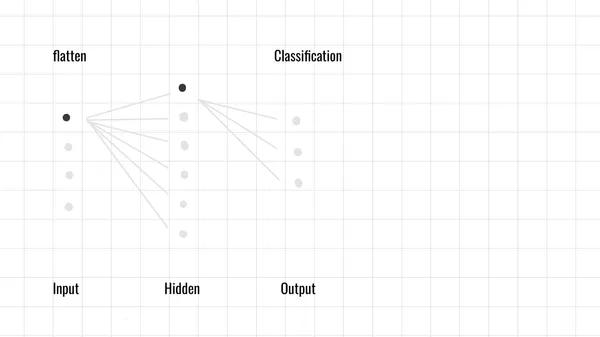
輸入層(Input Layer)
輸入層負責接收來自 卷積層 或 池化層 所提取到的特徵,並將他進行展開(flatten),也就是將一個三維矩陣 (如高度 × 寬度 × 通道數)變成1維向量。
隱藏層(Hidden Layers)
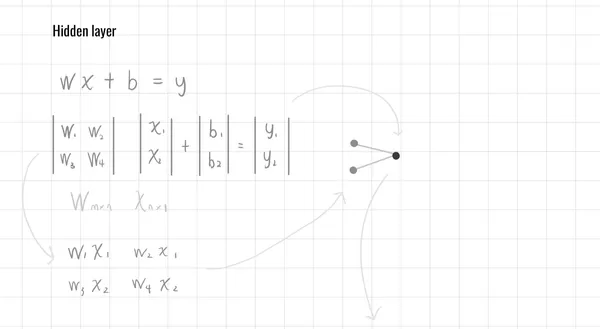
由多個神經元組成,每個神經元會將參數進行加權求和,在通過激活函數來進行調整,最後完成輸出總和
隱藏層也可以有多層,多層的網絡能夠學習更加抽象的特徵,每增加一層隱藏層,模型的表達能力會顯著增強,使其能夠捕捉到更複雜的模式。
公式表達:
- W 為權重矩陣 (設計權重矩陣大小)
- f(x) 為激活函數(如 Sigmoid、Softmax)
- X 為輸入矩陣 (如 Flatten特徵向量所輸入)
- b 為偏置項 (調整參數)
- y 為輸出結果 (使用函數來分類)
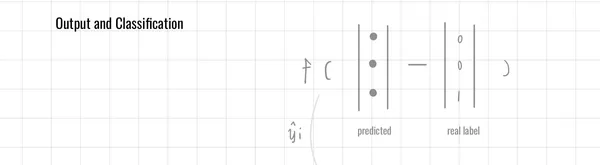
輸出層(Output Layer)
常見函數
多分類問題
使用 Softmax 函數,輸出每個類別的機率
- 為預測權重,為一個連續的結果
二元分類問題
使用 Sigmoid 函數,二元問題意味著合格與不合格等等判別
- 為預測權重
前向傳播(Forward Propagation)
前向傳播指的是從輸入層→隱藏層→輸出層的一個流程,也就是到目前為止的流程,可以先知道前向傳播的意思,因為後續會有一個相對應的流程稱為反向傳播(Backpropagation,BP)。
損失函數
損失函數主要為了計算「預測值」與「正確的標籤」存在多少誤差,當輸出層輸出結果後,會拿取預測值在與真實標籤來比較,量化這個差距的數值稱為損失函數
例如
在Tensorflow模型每次(Epoch )訓練階段完成時可以看到損失函數,透過觀察損失函數變化,來了解模型當前的訓練狀況,損失函數每次結果越小則模型表現越佳。
Epoch 1/10
240/240 - 52s - loss: 0.5044 - accuracy: 0.8526 - val_loss: 0.1444 - val_accuracy: 0.9571 - 52s/epoch - 217ms/step函數常見的有:
- 平均絕對誤差(MAE,Mean Absolute Error):計算預測值與真實值之間差異的絕對值平均。
- 均方誤差(MSE,Mean Squared Error):計算預測值與真實值之間差異的平方平均。
- 交叉熵(Cross-Entropy):常用於分類問題,衡量預測的概率分佈與真實分佈之間的差異。
反向傳播(Backpropagation,BP)
當結束向前傳播流程後,即來到反向傳播,先是計算損失函數求得梯數,在通過調整網絡中的權重,讓預測結果更接近真實值
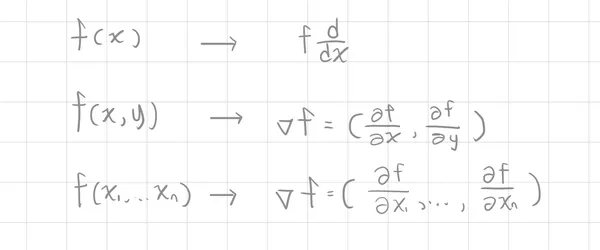
梯度 (Gradient)
梯度是向量微積分 ( Vector calculus)中的概念,也用作多元微積分 (Multivariable calculus),為了先繼續聚焦在神經網路中的主題,在這部分先初步理解梯度表示與特性,這裡的梯度為偏導數以及多維(multi-dimensional)概念
梯度表示
以及一個梯度的例子
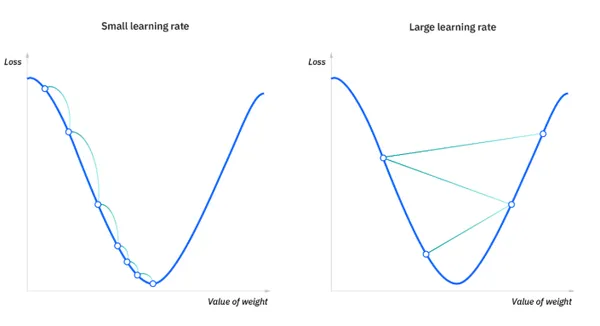
梯度下降(Gradient Descent)
是損失函數對參數的偏導數,目標是最小化損失函數(Cost Function),或預測值與真實值之間的誤差,讓模型的預測結果更接近真實值。
使用優化器(Optimizer)根據梯度更新權重:
其中:
- 是當前的權重參數
- 是學習率(learning rate)
- L() 是損失函數對權重的梯度,表示當前權重對損失的影響
梯度存在問題
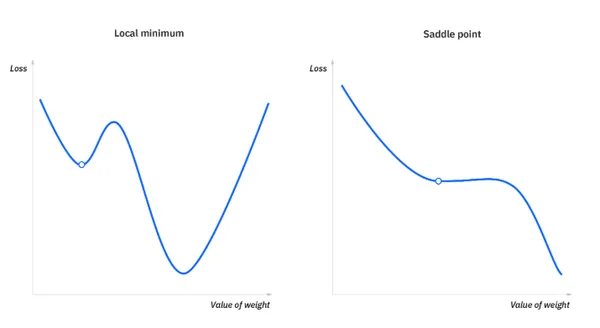
局部最小值和鞍點 ( Local minima and saddle points )
為了要達到模型最佳化,要解決凸點最佳化問題 (Convex optimization problems),目標是找到全局最小值 (global minimum),而不要被困在區域最小值 (local minimum)
梯度消失(Vanishing Gradient)
隨著神經網路的層層運算,某些層的梯度可能會越來越小,導致學習效果緩慢或停止,套用模擬神經元的設計構想,當部分權重參數趨近於零或歸零,也可稱為神經元死亡,為了解決這個問題使梯度從原本的線性問題調整為非線性問題。
解決方法:
使用 ReLU 激活函數(避免梯度消失)或 批次正規化(Batch Normalization)
梯度爆炸 (Exploding gradients)
梯度逐漸變大,可能導致權重更新過大,模型不穩定,解決這部分問題則稱為降維(dimensionality reduction)。
文章發布出處
卷積神經網絡-初版 (Convolutional Neural Networks, CNN). 36號系統. https://r036.blog/software/artificial-intelligence/AI20250003
參考文獻
[1] Vector Calculus: Understanding the Gradient(n.d.). Better Explained. https://betterexplained.com/articles/vector-calculus-understanding-the-gradient/
3Blue1Brown: But what is a neural network?
What Is Gradient Descent? (n.d.). IBM. https://www.ibm.com/think/topics/gradient-descent
What is learning rate in machine learning?(n.d.). IBM. https://www.ibm.com/think/topics/learning-rate
An overview of gradient descent optimization algorithms(n.d.). ruder.io. https://www.ruder.io/optimizing-gradient-descent/